我們擅長商業策略與用戶體驗的完美結合。
歡迎瀏覽我們的案例。
對人類來說,最具挑戰性的東西之一是繩子、電線或電纜等物品。這些薄而靈活的物體對于機器人來說更是難以駕馭,大多數機器人抓手根本無法處理它們。麻省理工學院的研究人員現在已經創造出了一種機器人抓手,能夠更近距離地模仿人類處理這類柔性物體的方式。
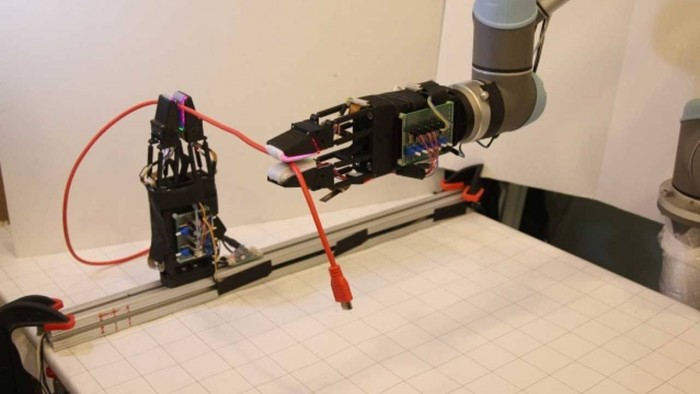
該系統使用一對帶有高分辨率觸覺傳感器的軟性機器人抓手,來操縱自由移動的電纜。該團隊打造了一個雙指夾持器,它重量輕、移動快,可以實時調整力道和位置。在每個抓手的頂端都有一個基于視覺的(GelSight)傳感器,該傳感器由軟橡膠制成,并嵌入了攝像頭。
抓手安裝在機械臂上,機械臂作為控制系統的一部分,能夠移動。GelSight 傳感器用于估計手指間電纜的位置,并測量電纜滑動的摩擦力。該系統具有雙控制器,并行運行,其中一個控制器可調節抓握力度,另一個控制器可調整抓手位置,以保持電纜被牢牢抓住。
該抓手能夠可靠地從隨機的抓握位置開始跟蹤 USB 電纜,并與第二個抓手結合,能夠像人一樣 "手把手 "地移動電纜,找到電纜的末端。該抓手還能夠適應不同材質和厚度的線纜。機器人能夠完成人類將耳塞插入手機時的常規動作。機器人從自由浮動的耳塞線纜開始,當感覺到插頭接觸到手指時,能夠滑動線纜雙指停止,并調整插頭將插頭插入插孔。
(邯鄲網站開發)